出典: フリー百科事典『ウィキペディア(Wikipedia)』
| この記事は検証可能な参考文献や出典が全く示されていないか、不十分です。出典を追加して記事の信頼性向上にご協力ください。(このテンプレートの使い方)
出典検索?: "推力偏向" – ニュース · 書籍 · スカラー · CiNii · J-STAGE · NDL · dlib.jp · ジャパンサーチ · TWL(2012年8月) |
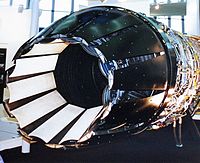 戦闘機用の推力偏向ノズル。ノズル口の向きを変えることで推力偏向を行う。
戦闘機用の推力偏向ノズル。ノズル口の向きを変えることで推力偏向を行う。
推力偏向(すいりょくへんこう)とは、ロケットエンジンやジェットエンジン、スクリュープロペラなど、噴流ないしその反作用によって推力を得るメカニズムにおいて、噴流の向きを変えることで、推力の向きを偏向させることである。
航空機では、固定翼のジェット機で、ジェットエンジンの噴流の向きをノズルで変えることで行われる。これにより推進力の一部で機体を持ち上げたり、補助翼や方向舵などの動翼だけに頼らずに機体の姿勢制御を行うことができ、フライ・バイ・ワイヤによる制御と組み合わせれば運動の幅を増すことが可能になる。そのためS/VTOL性能やドッグファイト時の機動性が求められる軍用機に実装されることが多い。スラスト・ベクタリング (thrust vectoring, TV) またはベクタード・スラスト (vectored thrust, VT) と呼ばれることもある。
固定翼機の推進装置はプロペラ(動力はレシプロエンジン又はターボプロップエンジン)かジェットエンジンであるが、これらの推進装置は進行方向の逆向きにエネルギーを放出し推力を発生させるように装着されている。機体を浮上させる揚力の大半を主翼から得て、機体の姿勢制御(モーメント制御)は尾翼の舵や主翼の補助翼といった動翼を操作して行うのが常である。しかしながら、機体がある程度の速度を持たねば動翼に揚力や抗力は発生せず、またその大きさ・方向や作用点を柔軟に変更することも難しい。そこで推進器の生み出す力を姿勢制御や浮揚力生成にも利用して、航空機の運動の幅をより広げようというのが推力偏向を行う基本的な考え方である。また、短距離離着陸機ではコアンダ効果を用いて排気の方向を変えるアッパーサーフェスブローイングのような例もある。
 シーハリアーの排気ノズル。後方 (0°) から真下 (90°) を超えて斜め前方にまで角度変更が可能なことがわかる。
シーハリアーの排気ノズル。後方 (0°) から真下 (90°) を超えて斜め前方にまで角度変更が可能なことがわかる。
 Su-35の推力偏向ノズル
Su-35の推力偏向ノズル
 エンジンポッドを上に向け上昇する飛行船
エンジンポッドを上に向け上昇する飛行船
推力偏向は小回りのよさや高い運動性が求められる軍用機で主に利用されてきた。アイデア自体は航空機の黎明期からあったものと思われるが、実用段階に達し始めるのは第二次世界大戦以後のVTOL機の開発においてである。離陸着陸の際には推力で直接機体を持ち上げ、水平飛行時には推力を進行方向へとスイッチするデザインの機体が各国で試作・実験された(詳しくは垂直離着陸機を参照)[注 1]。この種の機体の推力方向の切り替えはティルトローターやハリアーのようにプロペラやローターあるいはジェット噴射の向きを90°程度回転させて行うというものが多い。
近年ではジェット戦闘機の運動性向上のための手段として利用されている。この場合、排気ノズルや排気パドルの向きを制御することで推力偏向を実現する[注 2]。これは第4世代以上のジェット戦闘機では基本的な要素の一つとされている。特に、方向舵など空気力学的な機体制御は超音速領域では効果が小さく、超音速域においても高い機動性を発揮するには、推力偏向は必須の機能である。推力偏向によるポストストール機動[注 3]を行うと抵抗が増えて運動エネルギーを急激に消耗してしまうリスクがあるため、一概に空中戦で有利になるとはいえないが、使い方次第では空中戦の定理を根底から覆す可能性を秘めている。
また、ステルス性や燃費の面で注目されている全翼機の姿勢制御方法としても有効だと考えられる。ふつう全翼機は、可動翼を操作して風圧中心(空気力の作用中心点)を移動させることでピッチング(機首の上げ下げ)を行うことが多いが、水平尾翼を使って同様のことを行う場合に比べて制御が難しい。しかし、機体の上下方向に推力偏向すれば比較的容易にピッチングを行うことができる。もちろん、左右に推力偏向すればヨーイング(左右の首振り)も可能である。全翼機ではないが、無尾翼の実験機X-36はヨーイングに推力偏向を利用していた。
飛行船の多くは上昇の補助として上下に稼働するエンジンポッドを備えている。
 飛行状態の遷移途中にあるV-22。
飛行状態の遷移途中にあるV-22。
 推力偏向を利用したF-35B
推力偏向を利用したF-35B
 X-31によるJターンの模式図。推力偏向能力により、失速を積極的に利用してこのような機動が可能になった。
X-31によるJターンの模式図。推力偏向能力により、失速を積極的に利用してこのような機動が可能になった。
主にS/VTOL性能を追求したもの
- ハリアーシリーズ
- イギリスのホーカー・シドレーが開発した世界初の実用VTOLジェット戦闘機で、アメリカ海兵隊でも使用されている。
- エンジン(ロールス・ロイス ペガサス)は1基だが排気ノズルは4つあり、それらを回転させることで推力方向を転換し、垂直離着陸と水平飛行を実現する。
- Yak-38
- ソ連のヤコヴレフ設計局で開発されたVTOL艦載攻撃機。ハリアーとは異なり主エンジンの他にリフトエンジン2基を備えており、垂直離着陸時には前部荷重をリフトエンジンが、後部荷重を推力偏向した主エンジンが支える。
- Yak-141
- ソ連(開発中に崩壊しロシア連邦となった)のヤコブレフ設計局で開発されていたVTOL艦載戦闘機。Yak-38の後継として開発され、世界初の超音速VTOL機となる予定であったが、試作機の事故やソ連崩壊による財政難などの理由により開発は中止された。なお、推力偏向ノズルの技術が売却され、F-35Bの開発に活かされたという情報があるが、誤報である。
- V-22
- アメリカのベルとボーイングが開発し、初めて実用段階に達したティルトローター機。主翼端に取り付けられたローターとターボシャフトエンジンが転回して推力の方向を変える。ヘリコプター的な運用が可能な一方で高速・長距離巡航能力といった固定翼機の利点も持ち合わせている。
- F-35B
- アメリカのロッキード・マーティンを中心に国際協同開発のステルス性を備えたマルチロール機。S/VTOL性能があるのはB型で、Yak-141と同様に排気ダクトを約90°まで屈曲させることができる。垂直離着陸の際は機体前部に積まれたファンをエンジンからシャフトで駆動する。
主に飛行時の運動性を追求したもの
- Su-37
- ロシアのスホーイが開発した戦闘機。Su-27Mの発展型で、ピッチ方向に対して推力偏向可能なノズルを持つ。Su-27由来の運動性の高さに加え、さらにカナード(前翼)と推力偏向のコンビネーションにより従来の航空機では考えられないような機動を実現した[1]。また、Su-37の技術が転用されたSu-30MKI系列(インド向けのSu-30MKI、アルジェリア向けのSu-30MKA(英語版)、マレーシア向けのSu-30MKM、ロシア本国仕様のSu-30SM)にも同様のノズル(ただし、後ろから見ると、左右のノズルが逆「ハ」の字を描くように動く)が搭載されている。
- Su-57
- ロシアのスホーイが開発した戦闘機。ピッチ方向に16度、ヨー方向に20度に偏向可能なノズルを持ち、高い機動性を実現した。また、同様のノズルがSu-57よりフィードバックを受けたSu-35にも搭載されている。
- MiG-35とMiG-29 OVT
- ロシアのミグが開発した戦闘機。上下18度、左右5度の2軸仕様推力偏向ノズルを備える。世界初となるダブルクルビットや、ピッチアップ角80度以上で直進する(機体の腹側に前進する)ロースピードホバリングなどの曲芸機さながらの飛行を実施した。
- F-15S/MTD と F-15 ACTIVE
- マクドネル・ダグラスF-15にカナードや推力偏向ノズルを備えた実験機。S/MTDではピッチ方向の、ACTIVE ではピッチ・ヨー両方向の推力偏向が可能になっている。
- F-22
- ロッキード・マーティンが開発したアメリカの主力戦闘機。ピッチ方向に±20°まで偏向可能なパドルを備えている。これにより運動性が高まり、Jターンやコブラ、クルビットといった機動も可能である。
- X-31
- アメリカがドイツなどと共同で開発し、ロックウェルが製造したパドル式推力偏向装置を備えた実験機。パドル式は3枚のパドル(板)によって推力偏向ノズルより簡便な動作でピッチ方向とヨー方向に推力を偏向することができる。
- F-18 HARV
- NASAのLangley Research Centerが将来航空機の高迎角飛行特性を改善するためのデータを取得を目的とした高迎角飛行の研究機。X-31と同様に片方3枚合わせて6枚のパドルでピッチ方向とヨー方向に推力を偏向する。
- X-36
- マクドネル・ダグラスとNASAが開発した次世代戦闘機用の飛行技術検証のための実験機。ヨー方向の推力偏向能力を持ち合わせており[2]、カナードやスプリットエルロンとの組み合わせによる運動性は検証対象の一つであった。28 %スケールの無人研究機が製作されたのみで、実機は無い。
- X-2
- 日本の防衛省技術研究本部が三菱重工業を主契約企業として開発している先進技術実証機。X-31と同様に3枚のパドルによって推力を偏向する[3]。
 異なる推力によって生成されたジンバル角度モーメント
異なる推力によって生成されたジンバル角度モーメント
液体ロケットでは、エンジン全体をジンバル機構で傾けることにより推力を偏向する。
固体ロケットの場合は、ノズルを油圧や電動アクチュエータで傾けることにより推力を偏向する方式と、ノズル内に液体を噴射することにより推力を偏向する方式がある。
大半の船舶は、プロペラが生み出した水流を舵に当てたり、アジマススラスターのように推進装置自体を動かすなど、何らかの推力偏向を行っているが、元々そのような構造なので、わざわざ推力偏向とは言わない事が多い。
タグボートやしんかい6500などの深海探査艇などが、アジマススラスターを使っている。
注釈
- ^ 通常VTOL機とは呼ばれないが、ヘリコプターもそのような機体開発の流れの中で生まれた。ヘリコプターのローターは回転面を傾けることで浮揚力と推進力を生み出しているので、広い意味では推力偏向の一種と言える。
- ^ 運動性向上のために推力偏向が利用されるようになったのは、偏向機構の研究や大推力エンジンの開発が進んだこともあるが、何よりフライ・バイ・ワイヤとコンピュータを用いた飛行制御システムが発展したことが大きい。
- ^ 高迎え角時における失速状態で行う機動の事。有名なものにはコブラがある。
出典









